OPF-glTF point cloud¶
The OPF-glTF point cloud file format aims at storing spatially partitioned point clouds such as the photogrammetric sparse point cloud (tracks) or the densified point cloud. In particular:
The data is all memory-mappable
The data is spatially partitioned
The layout enables efficient partial rendering (LOD)
The layout enables efficient processing (octree data structure)
The data can be expanded with new runtime-defined attributes
The points attributes can be mutated with the exception of points positions
To each point can be associated a variable number of image matches, for instance detected features
The format uses a strict subset the glTF file format specification and adds definitions of custom glTF extensions. Thus an OPF glTF pointcloud is a fully valid glTF file. However any glTF file is not necessarily a valid OPF glTF pointcloud.
The format allows to store various pieces of information attached to a point cloud:
Spatial partitioning
Point attributes, both specified or custom.
Specified point attributes are:
positions - the only required attribute
normals
colors
matches
Matches associate points to a set of cameras where the points were matched. The match information comprises:
The range of indices of the matches associated to the point.
A camera per match.
Optionally an image point per match.
An image point comprises:
pixel coordinates: the position of the image point feature on the image
feature index: an index of the detected feature
scale: the diameter of the feature descriptor neighborhood
optionally the depth
Specification format |
Version of the format |
|---|---|
“model/gltf+json” |
“1.0-draft7” |
Format structure¶
The OPF-glTF point cloud file format is a valid glTF model. The format specifies the expected content. An OPF point cloud glTF file contains:
A scene referenced by the
sceneroot glTF property.A collection of root nodes referenced in the
nodesarray property of the glTF scene. Each node may have a spatial transform attached by the nodesmatrixproperty that transforms from the node internal coordinate system to the global scene one.A collection of meshes each referenced by the
meshproperty of the root nodes. Note that in glTF the geometric content is always referred as a “mesh”, even if the geometry has no connectivity as is the case for a pointcloud. The collection of nodes and associated meshes corresponds to a collection of pointclouds.For each mesh a unique mesh primitive corresponding to the full point cloud contained within the mesh. The mesh primitive mode must be set to
POINTS (0). There are no restriction on the size of the mesh primitives.[optional] An OPF_mesh_primitive_partitioning extension appended to the mesh primitive extensions containing the spatial partitioning data.
[optional] An OPF_mesh_primitive_matches extension appended to the mesh primitives extensions containing the image matches associated to the points.
[optional] An OPF_mesh_primitive_custom_attributes extension appended to the mesh primitives extensions containing extra point custom attributes accessors.
Data layout¶
Each node in the glTF file may have a different spatial transform attached allowing to store pointclouds in spatially separated portions. An example use-case for this is to allow the storage of pointclouds with very large spatial extent without precision loss due to single precision position storage, as the transforms may incorporate a spatial offset.
If a glTF node contains spatial partitioning, then the points are expected to be written in a specific layout. Below is an illustration of the expected data layout and partitioning in 1D.
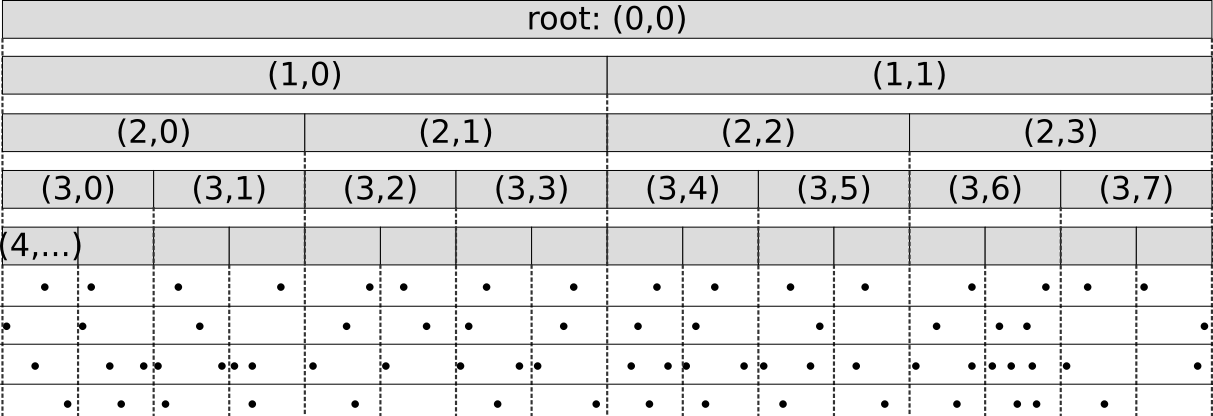
The node of the tree are indicated as grey boxes. The points are sampled in several “chunks”, corresponding in the illustration to the 4 rows of points at the bottom. Each chunk is a uniform sample of the whole point cloud without repetition. The chunks are stored contiguously one after the other in the data referred by the unique mesh primitive. Points within a chunk are Morton-ordered such that a range of points belonging to a node is embedded into the range of points belonging to its parent node. This layout is meant to allow efficient partial rendering and efficient processing.
Given an octree structure, the process of ordering the points as above consists in partitioning the points belonging to a node into the 8 octants of the node children, and recursively perform the same operation for those. The process starts from the root node, to which all points belong.
The above partitioning is stored into the OPF_mesh_primitive_partitioning extension.
glTF version, restrictions and constraints¶
The glTF asset.version property must be
2.0The glTF asset.extensions property must include the OPF_asset_version extension
The GLB format, also known as
binary-gltfis not supported.The glTF file shall not embed base-64 encoded data blobs.
The glTF data buffers must reside in separate binary files and be referenced by relative path URIs within the top-level glTF file. It follows that glTF buffer must have the uri property set.
The glTF specification mandates that all referenced buffers must be in little-endian byte order.
glTF accessors with the accessor.sparse property set are not supported.
glTF accessors type must be
SCALAR,VEC2,VEC3orVEC4, i. e. matrix types are not supported.glTF buffer views shall not have the byteStride property and glTF accessor shall not have the
byteOffsetproperty, i. e. heterogeneous types interleaved fields are forbidden.The glTF specification restricts data types to 32-bit or less integers. Floating point numbers are also constrained to single precision. In this specification we do need unsigned 64-bit integers. Those are simply represented as a vector of 2 unsigned 32-bit integers in little-endian byte order. The restriction on floating point precision has no impact on this specification.
Only a single mesh primitive is supported per mesh.
The OPF point cloud glTF file must use and must require the
KHR_materials_unlitextension.An OPF point cloud mesh primitive
modemust bePOINTS.An OPF point cloud mesh primitive material must reference a material using the
KHR_material_unlitextension.An OPF point cloud mesh primitive must have an attribute
POSITION.The accessor referenced by an OPF point cloud mesh primitive
POSITIONattribute must have the typeVEC3and component typeFLOAT.The OPF point cloud mesh primitives may have the following attributes in addition to the positions:
attribute
accessor
meaning
COLOR_0
type:
VEC4
component type:UNSIGNED_BYTEThe points color in RGBA quadruplet
NORMAL
type:
VEC3
component type:FLOATThe points normals
OPF-glTF point cloud extensions¶
The OPF-glTF point cloud uses extensions to store extra data in glTF format.
OPF_asset_version¶
The extension stores the OPF format specification version
OPF_asset_version¶
glTF extension storing the OPF specification version
OPF_asset_version Properties
Type |
Description |
Required |
|
|---|---|---|---|
version |
|
The OPF version in the form of |
✓ Yes |
OPF_mesh_primitive_partitioning extension¶
The extension extends the glTF mesh primitive object storing the octree spatial data structure and point cloud chunks information:
The root bounding box, in the same coordinate system than the points stored in the mesh referenced by the node.
The octree node indices (level, i, j ,k) where level is the octree level and i, j and k correspond to the node integer coordinates in the x, y and z directions respectively.
The octree node children. The actual tree.
For each node and each chunk, the range of indices of the points belonging to the chunk and the bounded space corresponding to the node.
The nodes are stored contiguously by level following a breadth-first-search order. An additional array of indices provides the index of the first node from each level, allowing to partially read the tree up to some level.
OPF_mesh_primitive_partitioning¶
glTF extension storing the spatial partitioning data structure
OPF_mesh_primitive_partitioning Properties
Type |
Description |
Required |
|
|---|---|---|---|
nodeIndices |
|
The index of the accessor to the nodes indices. The referenced accessor type MUST be |
✓ Yes |
boundingBox |
|
minimum and maximum 3D coordinates |
✓ Yes |
childrenIndexing |
|
The index of the accessor to the nodes children indexing. The referred accessor type MUST be |
✓ Yes |
nodeLevelIndexing |
|
The indexing of octree node levels. For a level |
✓ Yes |
perNodeChunkIndexRanges |
|
The accessor index corresponding the spatial partitioning point ranges. The referred accessor type MUST be |
✓ Yes |
nodeAttributes |
|
The extra node attribute name and index of the accessor for an additional per-node property. The referred accessor |
No |
NOTE
OPF datasets exported by Pix4Dmatic < 1.54 are impacted by a bug rendering stored point cloud and tracks invalid. In such datasets, the nodeIndices property of the partitioning extension is misnamed as nodeCoordinates. Such datasets may be patched using the script below:
import argparse
import json
import sys
from pathlib import Path
def patch_gltf(gltf_path):
extension_to_patch = "OPF_mesh_primitive_partitioning"
bad_key = "nodeCoordinates"
good_key = "nodeIndices"
gltf_obj = json.load(open(gltf_path, "r"))
for mesh in gltf_obj.get("meshes", []):
for primitive in mesh.get("primitives", []):
ext_obj = primitive.get("extensions", {}).get(extension_to_patch)
if ext_obj is None:
continue
if bad_key in ext_obj:
ext_obj[good_key] = ext_obj.get(bad_key)
del ext_obj[bad_key]
return gltf_obj
def gltf_point_cloud_uris(opf_obj):
for item in opf_obj.get("items", []):
if item["type"] in ["calibration", "point_cloud"]:
for resource in item.get("resources", []):
if resource["format"] != "model/gltf+json":
continue
yield resource["uri"]
parser = argparse.ArgumentParser(
description="Patch OPF project with invalid OPF_mesh_primitive_partitioning extension"
)
parser.add_argument("opf_path", type=str, help="path to the opf project to patch")
args = parser.parse_args()
opf_obj = json.load(open(args.opf_path, "r"))
for gltf_uri in gltf_point_cloud_uris(opf_obj):
gltf_path = Path(args.opf_path).parent / gltf_uri
gltf_obj = patch_gltf(gltf_path)
json.dump(gltf_obj, open(gltf_path, "w"), indent=2)
OPF_mesh_primitive_matches extension¶
The extension extends the glTF mesh primitive object associating, to each point, a group of image matches. The group of matches is given as a packed pair of a 40-bit and a 24-bit unsigned integers. The first integer refers to the match offset index within the collection of matches. The second integer is the number of matches in the range.
OPF_mesh_primitive_matches¶
glTF extension storing the point matches
OPF_mesh_primitive_matches Properties
Type |
Description |
Required |
|
|---|---|---|---|
cameraUids |
|
The camera UIDs referenced by the match camera ids |
✓ Yes |
cameraIds |
|
The index of the accessor to the match camera ids. The referenced accessor type MUST be |
✓ Yes |
pointIndexRanges |
|
The index of the match index ranges accessor. The referred accessor type MUST be |
✓ Yes |
imagePoints |
|
Collection of attributes for image points |
No |
OPF_mesh_primitive_custom_attributes extension¶
The extension extends the glTF mesh primitive object used to store any extra attribute, with any type as supported by glTF (note that any custom attribute added directly to the mesh primitive attribute would be required to be 4-bytes aligned which is too constraining).
OPF_mesh_primitive_custom_attributes¶
Extension storing extra custom point attribute
OPF_mesh_primitive_custom_attributes Properties
Type |
Description |
Required |
|
|---|---|---|---|
attributes |
|
The collection of attribute name and corresponding accessor index containing the custom attribute. The referred accessor |
✓ Yes |
OPF-glTF point cloud parser support¶
To parse an OPF-glTF point cloud, a parser is not required to support the whole glTF specification. We expose below what level of support is expected. Each field is marked as either required, ignored, supported, unsupported or constrained. The meaning of these is described below:
keyword |
parser behavior |
|---|---|
glTF-required |
The field is required by the glTF specification. The parser must fail with an error if the field is not found |
required |
The parser may fail with an error if the field is not found |
ignored |
The parser may ignore the field completely |
supported |
The parser must parse the field, yielding the field intended effect |
unsupported |
The parser may choose to fail with an error if the field is encountered |
constrained |
The parser may choose to fail with an error if the constraint is not met |
With those definitions, any parser supporting the full glTF specification is a valid OPF-glTF point cloud parser. On the other hand, a valid OPF-glTF point cloud parser may choose to ignore some input or fail upon encountering glTF content outside of the subset specified hereby.
Asset¶
property |
value |
comment |
|---|---|---|
version |
constrained |
must be “2.0” |
generator |
ignored |
|
minVersion |
ignored |
|
copyright |
ignored |
|
extensions |
constrained |
must include the OPF_asset_version extension |
extras |
ignored |
Material¶
property |
value |
comment |
|---|---|---|
extensions |
constrained |
must include the |
extras |
ignored |
|
name |
ignored |
|
pbrMetallicRoughness |
ignored |
|
normalTexture |
ignored |
|
occlusionTexture |
ignored |
|
emissiveTexture |
ignored |
|
emissiveFactor |
ignored |
|
alphaMode |
ignored |
|
alphaCutoff |
ignored |
|
doubleSided |
ignored |
Scene¶
property |
value |
comment |
|---|---|---|
nodes |
supported |
Each node corresponds to a pointcloud |
extensions |
ignored |
|
extras |
ignored |
|
name |
ignored |
Node¶
property |
value |
comment |
|---|---|---|
mesh |
supported |
|
extensions |
ignored |
|
name |
ignored |
|
extras |
ignored |
|
camera |
ignored |
|
children |
ignored |
|
skin |
ignored |
|
matrix |
supported |
Note that glTF follows a y-up convention. Points in a z-up coordinate system could be written without conversion by specifying a z-up to y-up rotation here. When written in the format required for this property (4x4 column-major matrix) that rotation is [1, 0, 0, 0, 0, 0, -1, 0, 0, 1, 0, 0, 0, 0, 0, 1]. |
rotation |
unsupported |
rotation support is covered by the affine matrix transform |
translation |
unsupported |
translation support is covered by the affine matrix transform |
weights |
ignored |
Mesh primitive¶
property |
value |
comment |
|---|---|---|
attributes |
constrained |
- must include |
material |
constrained |
The referred material extensions must contain the |
extensions |
supported |
- may include |
mode |
constrained |
must be 1 ( |
extras |
ignored |
|
indices |
ignored |
|
targets |
ignored |
Mesh¶
property |
value |
comment |
|---|---|---|
primitives |
constrained |
- must contain a single mesh primitive |
name |
ignored |
|
extensions |
ignored |
|
extras |
ignored |
|
weights |
ignored |
Accessor¶
property |
value |
comment |
|---|---|---|
bufferView |
required |
|
componentType |
glTF-required |
|
count |
glTF-required |
|
type |
glTF-required |
|
min |
constrained |
The glTF specification mandates this field to be set for the accessor referred by the mesh primitives |
max |
constrained |
The glTF specification mandates this field to be set for the accessor referred by the mesh primitives |
name |
ignored |
|
extensions |
ignored |
|
extras |
ignored |
|
byteOffset |
unsupported |
Interleaved attribute layout is not supported |
sparse |
unsupported |
|
normalized |
constrained |
must be set to |
BufferView¶
property |
value |
comment |
|---|---|---|
buffer |
glTF-required |
|
byteLength |
glTF-required |
|
target |
constrained |
must be |
byteOffset |
supported |
|
name |
ignored |
|
extensions |
ignored |
|
extras |
ignored |
|
byteStride |
unsupported |
Only packed contiguous data layout is supported |
Buffer¶
property |
value |
comment |
|---|---|---|
uri |
constrained |
must be a relative path URI (see relative path URI from the glTF specification) |
byteLength |
glTF-required |
|
name |
ignored |
|
extensions |
ignored |
|
extras |
ignored |
glTF¶
property |
value |
comment |
|---|---|---|
asset |
glTF-required |
|
extensionsUsed |
supported |
|
extensionsRequired |
supported |
|
materials |
supported |
|
scenes |
supported |
|
scene |
supported |
|
nodes |
supported |
|
meshes |
supported |
|
accessors |
supported |
|
bufferViews |
supported |
|
buffers |
supported |
|
extensions |
ignored |
|
extras |
ignored |
|
animations |
ignored |
|
cameras |
ignored |
|
images |
ignored |
|
samples |
ignored |
|
textures |
ignored |
|
skins |
ignored |
Example¶
{
"accessors":[
{
"bufferView":0,
"componentType":5126,
"count":3074,
"max":[
0.9978801608085632,
0.9999374747276306,
0.999092161655426
],
"min":[
-0.9999937415122986,
-0.9994049668312073,
-0.9999921917915344
],
"type":"VEC3"
},
{
"bufferView":1,
"componentType":5126,
"count":3074,
"type":"VEC3"
},
{
"bufferView":2,
"componentType":5121,
"count":3074,
"normalized":true,
"type":"VEC4"
},
{
"bufferView":3,
"componentType":5125,
"count":10,
"type":"SCALAR"
},
{
"bufferView":4,
"componentType":5125,
"count":3074,
"type":"VEC2"
},
{
"bufferView":5,
"componentType":5126,
"count":10,
"type":"VEC2"
},
{
"bufferView":6,
"componentType":5125,
"count":10,
"type":"VEC2"
},
{
"bufferView":7,
"componentType":5126,
"count":10,
"type":"SCALAR"
},
{
"bufferView":8,
"componentType":5126,
"count":10,
"type":"SCALAR"
},
{
"bufferView":9,
"componentType":5125,
"count":9,
"type":"VEC4"
},
{
"bufferView":10,
"componentType":5125,
"count":10,
"type":"VEC2"
},
{
"bufferView":11,
"componentType":5125,
"count":18,
"type":"VEC4"
},
{
"bufferView":12,
"componentType":5125,
"count":9,
"type":"VEC2"
},
{
"bufferView":13,
"componentType":5123,
"count":3074,
"type":"SCALAR"
},
{
"bufferView":14,
"componentType":5125,
"count":3074,
"type":"SCALAR"
},
{
"bufferView":15,
"componentType":5121,
"count":3074,
"type":"SCALAR"
}
],
"asset":{
"extensions":{
"OPF_asset_version":{
"version":"1.0"
}
},
"generator":"Pix4D",
"version":"2.0"
},
"bufferViews":[
{
"buffer":0,
"byteLength":36888,
"target":34962
},
{
"buffer":1,
"byteLength":36888,
"target":34962
},
{
"buffer":2,
"byteLength":12296,
"target":34962
},
{
"buffer":3,
"byteLength":40,
"target":34962
},
{
"buffer":4,
"byteLength":24592,
"target":34962
},
{
"buffer":5,
"byteLength":80,
"target":34962
},
{
"buffer":6,
"byteLength":80,
"target":34962
},
{
"buffer":7,
"byteLength":40,
"target":34962
},
{
"buffer":8,
"byteLength":40,
"target":34962
},
{
"buffer":9,
"byteLength":144,
"target":34962
},
{
"buffer":9,
"byteLength":80,
"byteOffset":144,
"target":34962
},
{
"buffer":9,
"byteLength":288,
"byteOffset":296,
"target":34962
},
{
"buffer":9,
"byteLength":72,
"byteOffset":224,
"target":34962
},
{
"buffer":10,
"byteLength":6148,
"target":34962
},
{
"buffer":11,
"byteLength":12296,
"target":34962
},
{
"buffer":12,
"byteLength":3074,
"target":34962
}
],
"buffers":[
{
"byteLength":36888,
"uri":"positions.bin"
},
{
"byteLength":36888,
"uri":"normals.bin"
},
{
"byteLength":12296,
"uri":"colors.bin"
},
{
"byteLength":40,
"uri":"matchCameraIds.bin"
},
{
"byteLength":24592,
"uri":"matchPointIndexRanges.bin"
},
{
"byteLength":80,
"uri":"matchPixelCoordinates.bin"
},
{
"byteLength":80,
"uri":"matchFeatureIds.bin"
},
{
"byteLength":40,
"uri":"matchScales.bin"
},
{
"byteLength":40,
"uri":"matchDepths.bin"
},
{
"byteLength":584,
"uri":"partitioning.bin"
},
{
"byteLength":6148,
"uri":"classes.bin"
},
{
"byteLength":12296,
"uri":"tags.bin"
},
{
"byteLength":3074,
"uri":"flags.bin"
}
],
"extensionsRequired":[
"KHR_materials_unlit"
],
"extensionsUsed":[
"KHR_materials_unlit",
"OPF_asset_version",
"OPF_mesh_primitive_custom_attributes",
"OPF_mesh_primitive_matches",
"OPF_mesh_primitive_partitioning"
],
"materials":[
{
"extensions":{
"KHR_materials_unlit":{
}
}
}
],
"meshes":[
{
"primitives":[
{
"attributes":{
"COLOR_0":2,
"NORMAL":1,
"POSITION":0
},
"extensions":{
"OPF_mesh_primitive_custom_attributes":{
"attributes":{
"class":13,
"flag":15,
"tag":14
}
},
"OPF_mesh_primitive_matches":{
"cameraIds":3,
"cameraUids":[
0,
1,
2,
3
],
"imagePoints":{
"depths":8,
"featureIds":6,
"pixelCoordinates":5,
"scales":7
},
"pointIndexRanges":4
},
"OPF_mesh_primitive_partitioning":{
"boundingBox":{
"max":[
1.0,
1.0,
1.0
],
"min":[
-1.0,
-1.0,
-1.0
]
},
"childrenIndexing":10,
"nodeAttributes":{
"parent":12
},
"nodeIndices":9,
"nodeLevelIndexing":[
0,
1,
9
],
"perNodeChunkIndexRanges":11
}
},
"material":0,
"mode":0
}
]
}
],
"nodes":[
{
"matrix":[
1.0,
0.0,
0.0,
0.0,
0.0,
0.0,
-1.0,
0.0,
0.0,
1.0,
0.0,
0.0,
0.0,
0.0,
0.0,
1.0
],
"mesh":0
}
],
"scene":0,
"scenes":[
{
"nodes":[
0
]
}
]
}